Celem projektu było opracowanie i wdrożenie układu sterowania silnikami krokowymi przy użyciu programowalnego układu FPGA oraz języka opisu sprzętu VHDL. Dodatkowo, w układzie zastosowano enkodery inkrementalne, umożliwiające precyzyjną kontrolę położenia i prędkości wału silnika. Projekt stanowił kompleksowe rozwiązanie, obejmujące zarówno część sprzętową (FPGA i układy peryferyjne), jak i oprogramowanie (moduły w VHDL).
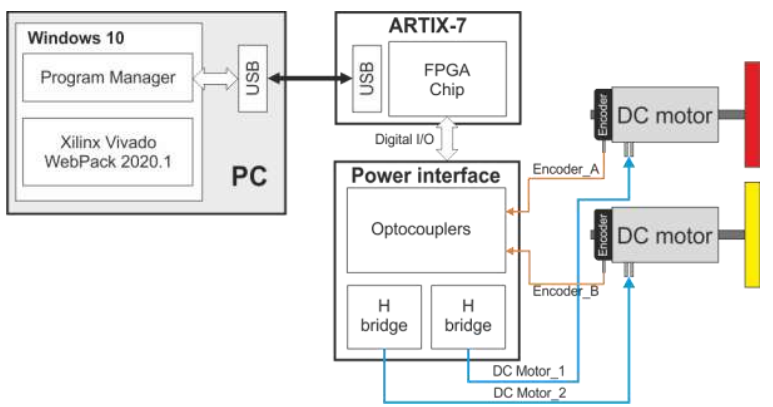
W pierwszej fazie zdefiniowano architekturę systemu: przygotowano moduł odbierający sygnały z enkodera oraz moduł generujący sygnały sterujące do silnika krokowego. Aby zapewnić płynną pracę, wykorzystano licznik impulsów z enkodera do wyznaczania aktualnej pozycji oraz ewentualnych błędów położenia. Dane o położeniu były następnie porównywane z wartością zadaną (np. wybraną w systemie sterowania czy przez interfejs użytkownika), co pozwalało na korekcję prędkości i kierunku obrotu silnika.
Zaimplementowane w VHDL bloki logiki umożliwiły konfigurację parametrów sterowania, takich jak prędkość, maksymalne przyspieszenie czy rozdzielczość kroku. Dzięki wykorzystaniu FPGA udało się osiągnąć wysoką wydajność i elastyczność – można było łatwo modyfikować algorytm sterowania oraz reagować na zmieniające się warunki pracy silnika. Projekt z powodzeniem zademonstrował możliwości sprzętowego sterowania silnikami krokowymi z precyzyjnym sprzężeniem zwrotnym, co w praktyce przekłada się na stabilną i dokładną kontrolę ruchu w zastosowaniach przemysłowych i prototypowych.