The goal of this project was to develop and implement a stepper motor control system using an FPGA and the VHDL hardware description language. Additionally, the system utilized incremental encoders, enabling precise control of the motor shaft position and speed. The project provided a comprehensive solution, incorporating both hardware components (FPGA and peripheral circuits) and software (VHDL modules).
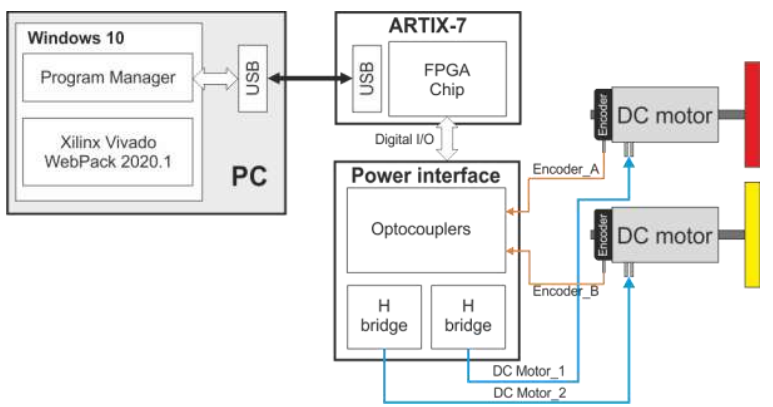
In the initial phase, the system architecture was defined, including a module for receiving signals from the encoder and a module for generating control signals for the stepper motor. To ensure smooth operation, pulse counters from the encoder were used to determine the current position and detect potential positioning errors. The position data was then compared with the setpoint (e.g., defined within the control system or via the user interface), allowing for speed and direction adjustments of the motor.
The implemented VHDL logic blocks enabled the configuration of control parameters such as speed, maximum acceleration, and step resolution. Leveraging FPGA technology achieved high performance and flexibility—allowing for easy modifications to the control algorithm and adaptation to changing operating conditions. The project successfully demonstrated hardware-based stepper motor control with precise feedback, which in practice translates into stable and accurate motion control in industrial and prototyping applications.